采用川崎最新技术挑战性的装配过程自动化
自动化控制技术的进步使机器人可以完成以前无法完成的复杂装配过程。在过去的40多年中,川崎不断改进技术,以满足装配应用的高要求。
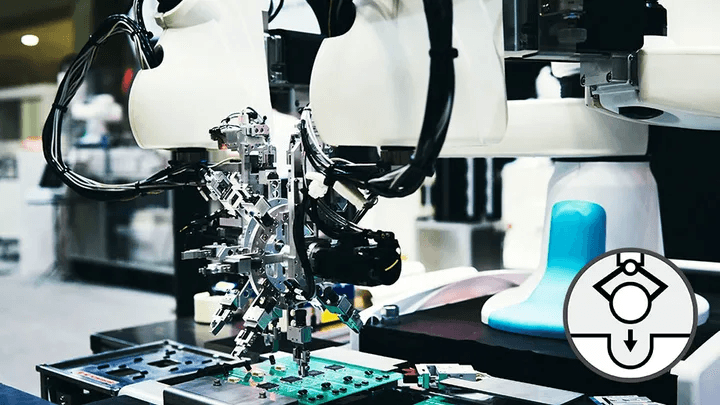
川崎提供了利用2维和3维视觉系统进行检查和运动制导所需的标准接口。这些视觉系统可以识别要被组装的零部件的样式,或专门定位一个零部件的特征以准确地组装产品。在控制硬件和软件方面的进步允许机器人逐渐与模具或零部件切合以校正任何的位置误差。对于大型装配应用,多个机器人可以同步操作,利用协同运动控制来举起或组装大型组件。手臂工装和多轴定位器的伺服端可全部由川崎机器人控制柜来控制,以便在单一工作单元完成多重装配操作。
川崎的创新性硬件和软件可以帮助您应对复杂的装配挑战。
应用视频

20-径向零件安装
21-软导线装配零件
22-多控制阀组装

25-基板螺丝紧固组装

26-安装部件的排列
28-木制托盘自动组装

CPU装配
AS011p_车体组装 CX210L,BX300L,BX100S,BA006N

25-基板螺丝紧固组装
装配的机器人

中小型通用机器人 〜80kg负载
可搬运3~80kg物品的小型、中型通用机器人。

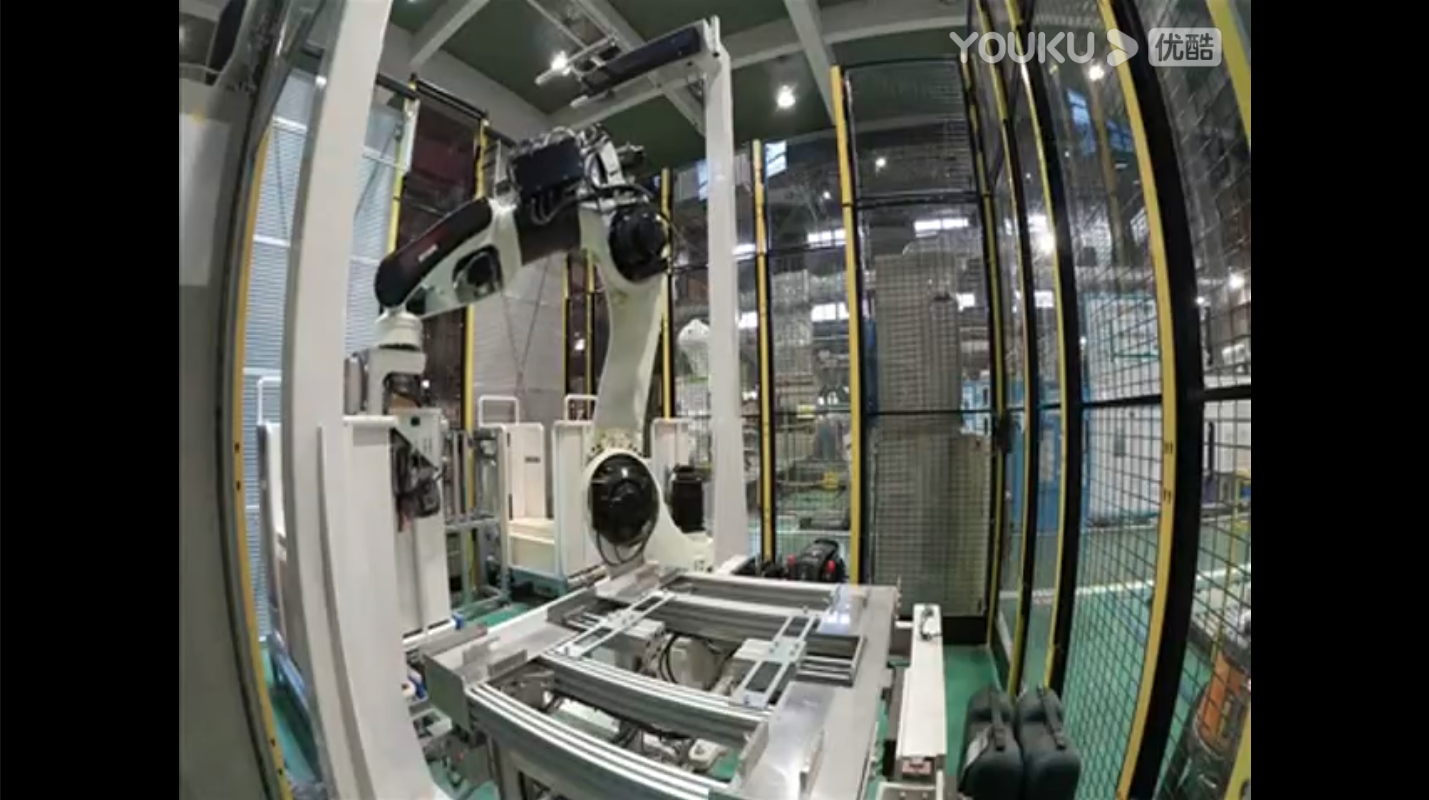
大型通用机器人 〜300kg负载
可搬运100~300kg重物的大型通用机器人。

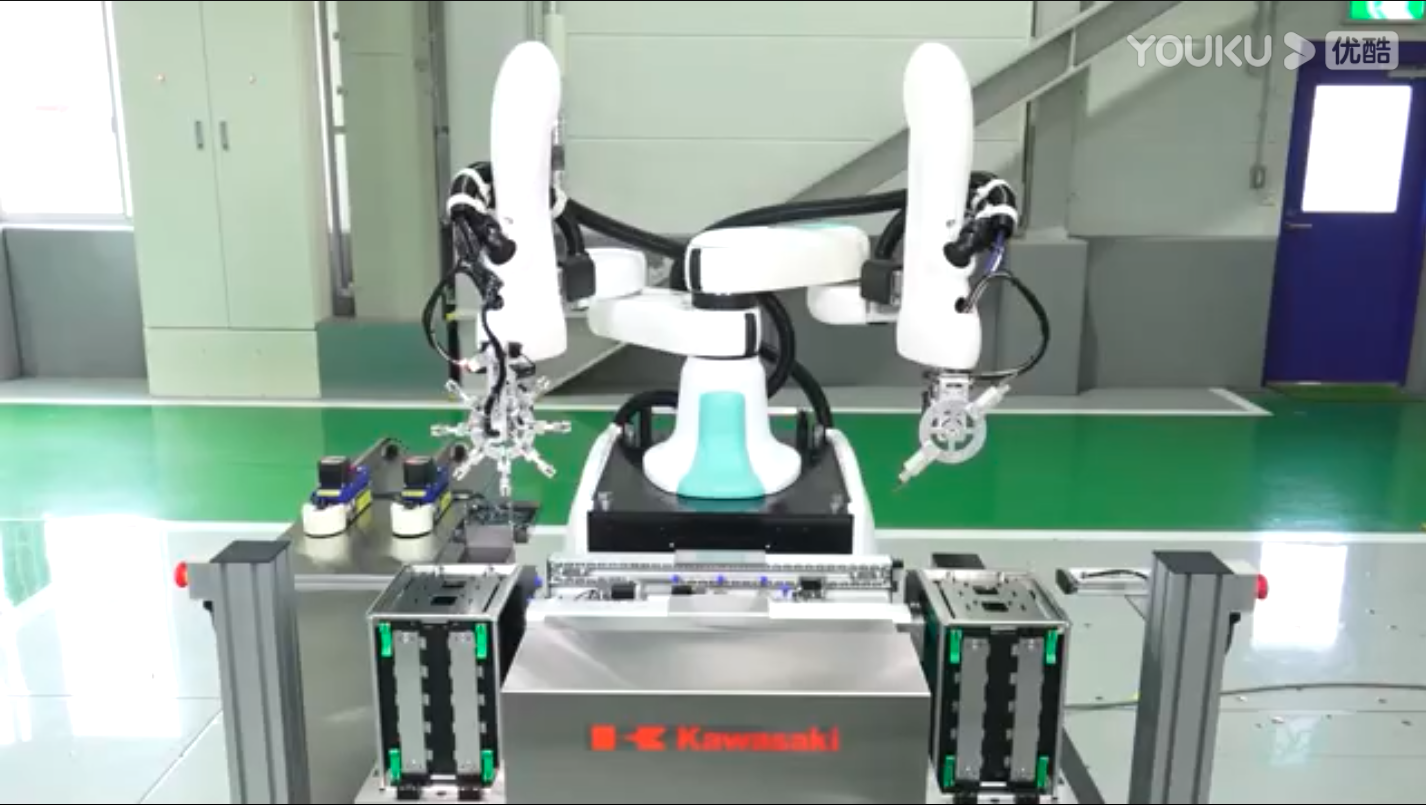
协作机器人
由川崎独立开发的、可以与人类共存、共同工作的双臂水平多关节机器人。

高速分拣机器人
高速抓取小型零部件和食品并进行分类的机器人。