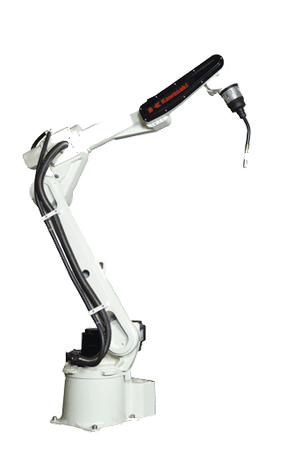
BA006L 最大有效载荷6 Kg最大臂展2036 mm机器人分类焊接/切割机器人安装方法吊顶, 地面系列BA 系列 熟练而灵活的弧焊机器人 川崎的复杂的弧焊机器人从安装时刻起就展示了一个专业操作员的潜质。 应用分类搬运, 焊接, 抓取支持的控制器F60, F01, E01 资料下载 手册 下载 CAD (STEP) 下载 CAD (DXF) 下载 规格 下载 手册 下载 手册 (弧焊) 下载 ※使用本网站上刊载的CAD数据时,请确认并事先了解 点击此处 注意事项. 应用视频 山东矿机应用视频

※使用本网站上刊载的CAD数据时,请确认并事先了解 点击此处 注意事项.