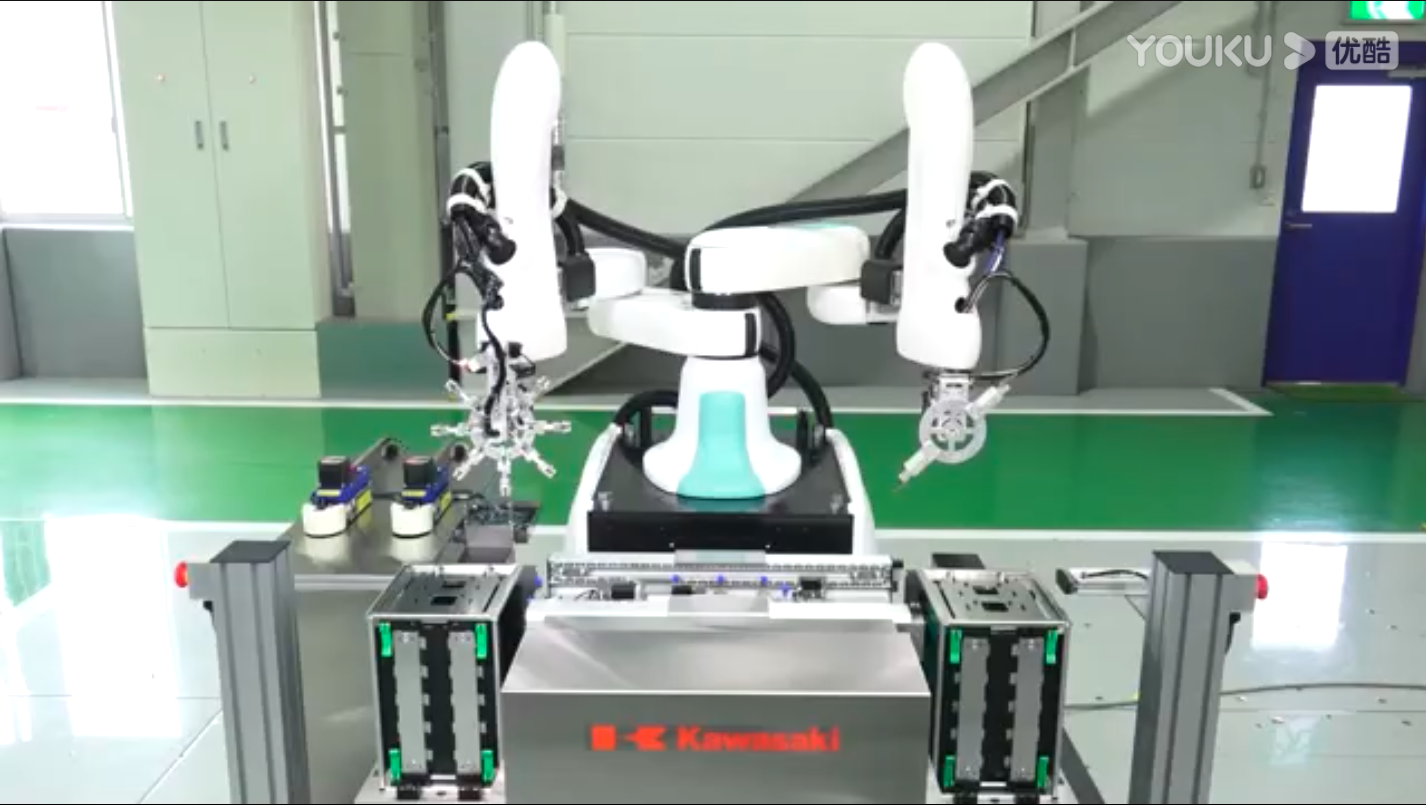
duAro1 最大有效载荷2 Kg最大臂展760 mm机器人分类协作机器人安装方法地面系列duAro 系列 川崎机器人革新突破——双腕duAro 实现了真正的人机协作。 应用分类装配, 搬运, 上下料, 涂胶, 抛光、去毛刺 资料下载 手册 下载 CAD (STEP) 下载 CAD (DXF) 下载 规格 下载 ※使用本网站上刊载的CAD数据时,请确认并事先了解 点击此处 注意事项. 应用视频 26-安装部件的排列 20-径向零件安装 21-软导线装配零件 查看更多 关闭 25-基板螺丝紧固组装 26-安装部件的排列 CPU装配 25-基板螺丝紧固组装







※使用本网站上刊载的CAD数据时,请确认并事先了解 点击此处 注意事项.